
Die Arduino-UNO-Familie verfügt zwar über 14 digitale Pins, dennoch kann man bei größeren Projekten schnell an Grenzen stoßen. Bussysteme verbinden Peripherie-Geräte mit dem Controller. Damit der Aufwand der Verdrahtung möglichst gering bleibt, sollten so wenig Leitungen wie möglich verbaut werden. Aus dieser Grundüberlegung wurden in der Vergangenheit verschiedene serielle Zweidrahtbussysteme entwickelt, die für das Senden und Empfangen von Daten mit nur zwei Datenleitungen auskommen.
Die Bezeichnungen von Controller und Peripherie-Geräten waren historisch bedingt Master und Slave. Ich schließe mich der Resolution der 🔗Open Source Hardware Association und der von 🔗arduino.cc vorgeschlagenen Terminologie an und verwende die neuen Namen.
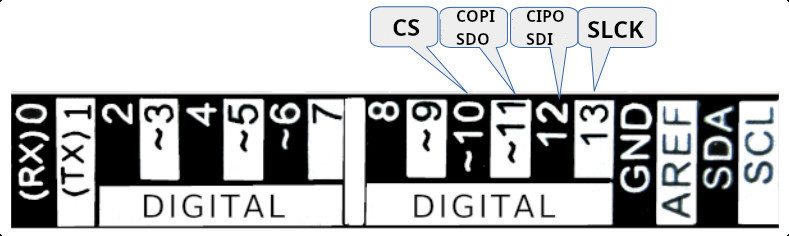
Der SPI-Bus (Serial Peripheral Interface) benötigt zwei Datenleitungen und zwei Steuerleitungen:
Datenleitungen (in Klammern alternative Bezeichnungen)
| Bezeichnung | Erklärung | Standard Pin UNO |
|---|---|---|
| SDO COPI PICO (DO, SO) | Serial Data Out Controller Out, Peripheral In Peripheral In Controller Out Daten vom Controller zum Peripherie-Gerät schreiben | 11 |
| SDI CIPO POCI (DI, SI, DIN) | Serial Data In Controller In, Peripheral Out Peripheral Out Controller In Daten vom Peripherie-Gerät empfangen | 12 |
Steuerleitungen (in Klammern alternative Bezeichnungen)
| Bezeichnung | Erklärung | Standard Pin UNO |
|---|---|---|
| SLCK (CLK, SCK) | Serial Clock → Taktimpulse, dient der Synchronisation der Datenübertragung | 13 |
| CS (CSB, CSN, STE, SYNC) | Chip Select Wird vom Controller aktiviert, um die Kommunikation mit einem Peripheriegerät zu starten | 10 |
Anmerkung:
gelegentlich gibt es auch die Bezeichnung SDA, allerdings wird die Bezeichnung auch beim ➨I2C-Bus verwendet
Zusätzliche Pins (in Klammern alternative Bezeichnungen)
| Bezeichnung | Erklärung | Standard Pin UNO |
|---|---|---|
| RES (RST, REST) | Reset des Bauteils | 8 |
| DC (RS) | Data Communication Daten Kommunikation | 9 |
 I²C-Bus
I²C-Bus Letzte Aktualisierung: