


Bewegt sich ein Objekt auf den Entfernungsmesser zu, soll je nach dem noch verfügbaren Abstand zum Entfernungsmesser ein akustisches und optisches Signal gegeben werden.
So sieht es aus:
Der Ultraschallsensor misst die Entfernung zum Hindernis.
Je kleiner der Abstand wird, desto schneller blinkt die LED und die Abstände zwischen den Tonsignalen werden kleiner.

Benötigte Bauteile:
- rote LED
- Lautsprecher
- Widerstand 220 Ω
- Ultraschallsensor HC-SR04
- Leitungsdrähte
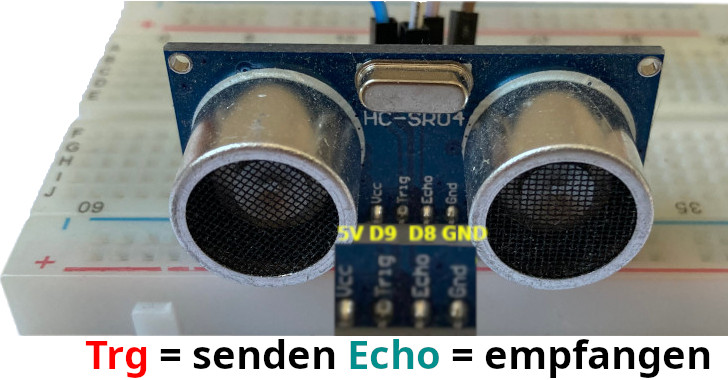
Damit der Ultraschallsensor ordnungsgemäß arbeiten kann, musst du ihn so einstecken, dass Sender und Empfänger nach vorn zeigen, damit das Signal ungehindert gesendet und empfangen werden kann. Die Leitungsdrähte werden auf der Rückseite eingesteckt.
Baue die Schaltung auf.
(Fahre mit der Maus über das Bild, um die Bezeichnungen der Bauteile zu sehen)
| Abstand zum Entfernungsmesser in cm | Abstand zwischen den Signalen in Millisekunden |
|---|---|
| 13 bis 15 | 700 |
| 11 bis 12 | 500 |
| 9 bis 10 | 300 |
| 7 bis 8 | 200 |
| 5 bis 6 | 100 |
| 2 bis 4 | 0 |
Kleinere Abstände als 2 cm können nicht gemessen werden.
Im Kopf werden die Variablen definiert. Außerdem soll die Zuweisung der Variablen mit ⇒define erfolgen.
Der setup-Teil definiert die Bauteile als Eingabe-/Ausgabegeräte.
#define LAUTSPRECHER 4
#define LED 5
#define SENDEN 9
#define ECHO 8
void setup()
{
pinMode(SENDEN, OUTPUT);
pinMode(ECHO, INPUT);
pinMode(LAUTSPRECHER, OUTPUT);
pinMode(LED, OUTPUT);
}Die Funktion EntfernungMessen() misst die Entfernung des Objekts zum Entfernungsmesser.
int EntfernungMessen()
{
long Entfernung = 0;
// Sender kurz ausschalten um Störungen des Signal zu vermeiden
digitalWrite(SENDEN, LOW);
delay(5);
// Signal senden
digitalWrite(SENDEN, HIGH);
delayMicroseconds(10);
digitalWrite(SENDEN, LOW);
// pulseIn ⇒ Zeit messen, bis das Signal zurückkommt
long Zeit = pulseIn(ECHO, HIGH);
// Entfernung in cm berechnen
Entfernung = (Zeit / 2) * 0.03432;
return Entfernung;
}Der loop-Teil sorgt dafür, dass je nach gemessener Zeit der Lautsprecher im Intervall piepst und die LED im gleichen Intervall kurz aufleuchtet.
⇒switch fragt einen Wertebereich ab.
Beachte, dass vor und nach den drei Punkten ein Leerzeichen stehen muss.
void loop()
{
// Funktion aufrufen
long Entfernung = EntfernungMessen();
// versuchen Messfehler auszuschließen
if (Entfernung < 100)
{
switch (Entfernung)
{
case 13 ... 15:
tone(LAUTSPRECHER, 1000, 2);
digitalWrite(LED, HIGH);
delay(50);
digitalWrite(LED, LOW);
delay(500);
break;
case 11 ... 12:
tone(LAUTSPRECHER, 1000, 2);
digitalWrite(LED, HIGH);
delay(50);
digitalWrite(LED, LOW);
delay(400);
break;
case 9 ... 10:
tone(LAUTSPRECHER, 1000, 2);
digitalWrite(LED, HIGH);
delay(50);
digitalWrite(LED, LOW);
delay(300);
break;
case 7 ... 8:
tone(LAUTSPRECHER, 1000, 2);
digitalWrite(LED, HIGH);
delay(50);
digitalWrite(LED, LOW);
delay(200);
break;
case 5 ... 6:
tone(LAUTSPRECHER, 1000, 2);
digitalWrite(LED, HIGH);
delay(50);
digitalWrite(LED, LOW);
delay(100);
break;
case 2 ... 4:
tone(LAUTSPRECHER, 1000);
digitalWrite(LED, HIGH);
break;
}
}
}




Verwandte Anleitungen:
Letzte Aktualisierung: