



Wenn der Potentiometer gedreht wird, bewegt sich der Servomotor schrittweise nach links oder rechts.
So sieht es aus:

Ein Servomotor ist ein spezieller Elektromotor, der sich jeweils um 180° nach links und nach rechts drehen kann.
Benötigte Bauteile:
- Servomotor
- Potentiometer
- Leitungsdrähte
Baue die Schaltung auf.
(Fahre mit der Maus über das Bild, um die Bezeichnungen der Bauteile zu sehen)

In diesem Beispielprogramm führt die Drehung des Potentiometers zu einer Drehung des Servomotors.

➨map
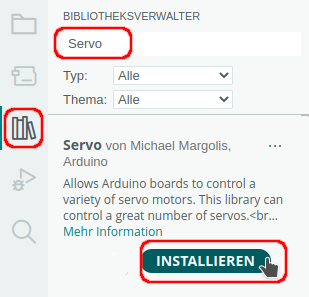
Benötigte Bibliothek
// benötigte Bibliothek einbinden
# include "Servo.h"
// Bezeichnung des Motors
Servo Motor;
// speichert den analogen Wert des Drehpotentiometers
int ReglerWert;
// Position des Motors
int Position;
void setup()
{
// Motor an Pin 9 angeschlossen (attach)
Motor.attach(9);
}
void loop()
{
int ReglerWert = analogRead(A0);
/*
umwandeln des gelesenen Wertes in die Drehung des Motors
von 0 bis 1023 (analoger Sensorwert)
auf 0 bis 180 (Links-Drehung des Motors)
oder:
auf 180 bis 0 (Rechts-Drehung des Motors)
*/
Position = map(ReglerWert, 0, 1023, 0, 180);
// Position = map(ReglerWert, 0, 1023, 180, 0);
// Motor zur Position bewegen
Motor.write(Position);
}




Verwandte Aufgaben:
- Automatische Tür mit Hall-Sensoren
- Glücksrad mit 360°-Servomotor
- Glücksrad mit Schrittmotor
- Glücksrad mit Servomotor
- Türöffner mit einem RFID-Modul und Servomotor
- Wahrsagerin
Letzte Aktualisierung: